“Mochibot” is an omnidirectional robot that moves like an amoeba
12/27/2018 / By Edsel Cook
Many research teams are trying to build multi-legged robots that can walk like real animals. More people, however, are working on much more challenging bipedal robots that mimic the two-legged walking motion of humans.
One Japanese research group decided to go the other way. An article on IEEE Spectrum reported that this group designed Mochibot, an omnidirectional robot that is fitted out with so many limbs, it is practically built out of legs.
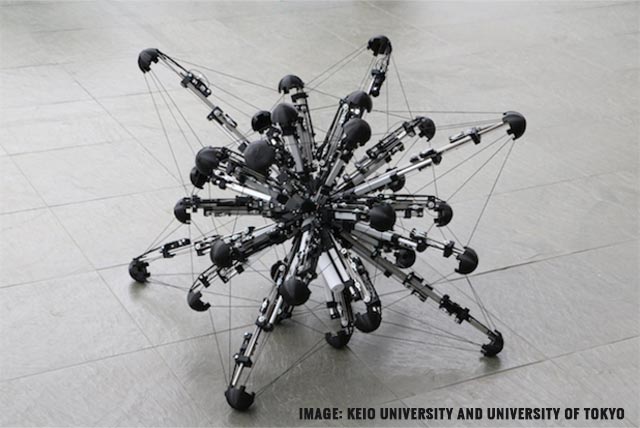
Mochibot features a staggering total of 32 legs. Each leg contains a set of actuators that power its telescoping movements. A leg can either extend or retract on its own — or it can work in tandem with the other legs.
Robot designs and organic lifeforms with that many legs usually take the form of a creepy crawly critter. Mochibot, however, is shaped like a rhombic triacontahedron, a polyhedron that features 32 vertices and 30 rhombus-shaped faces. This multi-faceted shape gives it the ability to move in any direction. (Related: Improved technology allows bipedal robots to maintain human-like balance.)
An omnidirectional robot that can deform its body to move or stop itself
Stability is what the researchers from Keio University and the University of Tokyo were after. For Mochibot, the rhombic triacontahedron is a better shape than a perfect sphere.
A sphere touches the ground with only one point, which leads to it rolling around at the slightest provocation. A polyhedron is much more stable because it touches the ground at multiple points on its surface.
Furthermore, Mochibot can alter its body. It can change how much of its surface is in physical contact with the ground, which helps it stay in place or speeds up its movement.
The omnidirectional robot moves by retracting the legs pointing in the direction it wants to go. At the same time, it extends the arms on the opposite direction to push its body forward.
To hit the brakes, Mochibot deliberately flattens the side that is parallel to the ground. It does this by contracting the appropriate legs, which are made of three sliding rails that work similar to linear actuators.
Depending on how far its legs are extended, Mochibot’s body can measure anywhere from 0.5 meters to one meter in diameter. Its 20-pound weight includes its electric batteries. Thanks to its design, it has plenty of space to mount cameras, sampling devices, sensors, and other equipment on its legs.
Omnidirectional robots will one day be sent to other planets
NASA researchers are working on somewhat similar tensegrity robots for deployment on the Moon, Mars, and other extraterrestrial surfaces. Also called “Super Ball Robots,” these robots look like children’s toys. They move by taking flopping motions that involve their entire framework.
Tensegrity robots are much more deformable than Mochibot. The NASA models have survived getting thrown off rooftops by amused engineers.
Mochibot’s advantage is its superior ability to reshape itself. Because it can come quite close to the shape of a sphere, it can move much more smoothly and easily in any direction.
In comparison, NASA’s Super Ball Robot has a much more difficult time flopping in the right direction. It is highly reliant on very complicated machine-learning algorithms for movement.
Mochibot is also expected to outperform conventional wheeled rovers. It can move in many more directions, it will have an easier time crossing loose terrain, and it can continue to move unhindered even if it loses several legs.
In addition to exploring other moon and planets, Mochibot’s designers believe their robot can be deployed to disaster areas and remote locations that are difficult for humans to access.
Check out Robotics.news for more articles about robots that scurry on many legs.
Sources include:
Tagged Under: all-terrain robot, autonomous robots, future tech, machine learning, omnidirectional robot, robotics, robots, tensegrity robots, walking robot, weird science
RECENT NEWS & ARTICLES

















